More like version 0.1, every part of it was bad in some way. We did robotic self-tuning monochords—single-string musical instruments—last spring in the mechatronics class. The students did pretty well.
Most of their robots were designed along similar lines: they had a servo with a pick to pluck the string, an electric guitar pickup from which the robot read the string’s frequency, and a stepper motor to spin a machine head to adjust the string’s tension (and thereby change the frequency). The design had some issues that the students didn’t have time to fix before they had to move on to their next projects. We found that the biggest problem was that the tension controls weren’t responsive. The machine heads are made more for precision than speed—with a guitar you have to tune a string precisely, but you shouldn’t have to do it very often so it doesn’t matter if it’s slow. One team adjusted the tension using a linear actuator that stretched the string by moving a bar back and forth, which was a novel idea but which also suffered from unresponsiveness since they necessarily used a lead screw as a linear actuator.
I figure a robot should be inherently precise compared to a human, so machine heads are the wrong tool for the job. We ought to be able to find a speedier way of adjusting the string frequency. Instead of adjusting the tension I wanted to try adjusting the string length like you do with your fingers in most real stringed instruments.
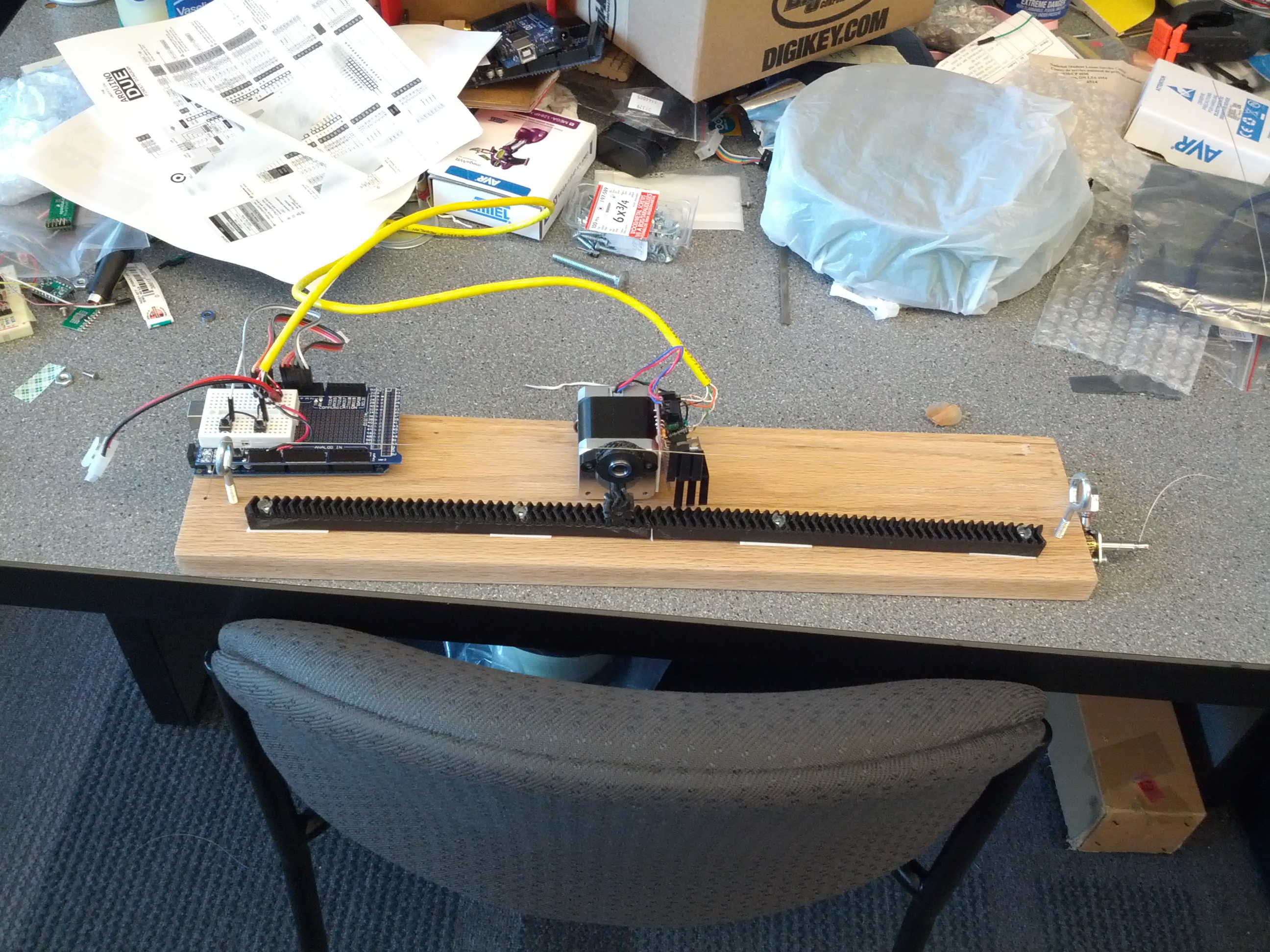
First try at a guitarbot.